RigFeatures
最終更新:
 yukkuri_mikan 2020年09月10日(木) 12:31:20履歴
yukkuri_mikan 2020年09月10日(木) 12:31:20履歴
翻訳元ページ
リグ機能
ネーミングと構成
階層とコレクション
アーマチュアレイヤー
リグの概要
ユーザーインターフェイス - コントローラ

選択ボタン
命名規則
リグの使い方
キャラクタのスケーリング
手と脚
手、または脚のコントローラ(例:c_hand_ik.l)を選択します。
Nキーを押して3Dビューの右側にあるプロパティパネルを表示し、ツールタブ>Rig Mainプロパティを確認して下さい。
プロパティ: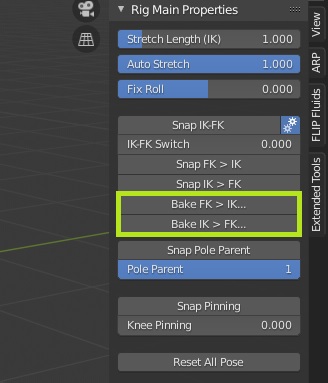
脚
脚のメインコントローラ
3ボーンの脚
肘と膝のピン止め
頭
リップ
眼とターゲット
自動まぶた
指
リギングのセットアップに応じて、2つまたは3つの指ボーンを回転させます(「スケールから指を回転させる」を参照してください)。
小指の人差し指を回転させると、他の指も同様に広がっていきます。
セカンダリコントローラ
ポーズのミラー
複数キャラクタに対応したUIカメラ
リグ機能 
ネーミングと構成
階層とコレクション
リグオブジェクトは、character1(デフォルトの名前で、変更可能です。詳細はキャラクタ名のセットを参照)という名前の親コレクションの一部です。
リグおよびUIオブジェクトは、子コレクションcharacter1_rigに含まれます。コントローラのボーンシェイプに使用されるカスタムシェイプは、子コレクションcharacter1_csに含まれます。このコレクションはデフォルトでは非表示になっています。
リグオブジェクトは、階層のルートオブジェクトとして、「char_grp」emptyオブジェクトの親にもなります。
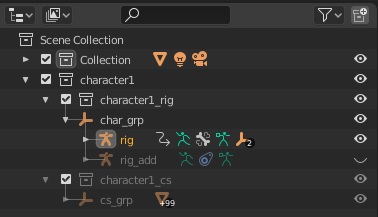
セカンダリコントローラにAdditiveモードを使用した場合、メインのアーマチュアの他に「rig_add」と名付けられた2つ目のアーマチュアが存在します。
リグおよびUIオブジェクトは、子コレクションcharacter1_rigに含まれます。コントローラのボーンシェイプに使用されるカスタムシェイプは、子コレクションcharacter1_csに含まれます。このコレクションはデフォルトでは非表示になっています。
リグオブジェクトは、階層のルートオブジェクトとして、「char_grp」emptyオブジェクトの親にもなります。
セカンダリコントローラにAdditiveモードを使用した場合、メインのアーマチュアの他に「rig_add」と名付けられた2つ目のアーマチュアが存在します。
- rigという名前のアーマチュアは、アニメーターが使用するアーマチュアです。
- デフォルトでは非表示になっているrig_addというアーマチュアは、アディティブリグです。これは編集するものではないので完全に無視しても構いませんが、セカンダリーボーンの中にはこれに依存しているものもあるので、Additiveモードのセカンダリーコントローラを使用する際には削除しないようにしましょう。
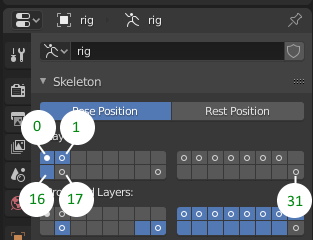
アーマチュアレイヤー
- レイヤー0:メインコントローラ
- レイヤー1:セカンダリコントローラ
- レイヤー16:その他の選択ボーン
- レイヤー17:リファレンスボーン
- レイヤー31:変形用ボーン
リグの概要
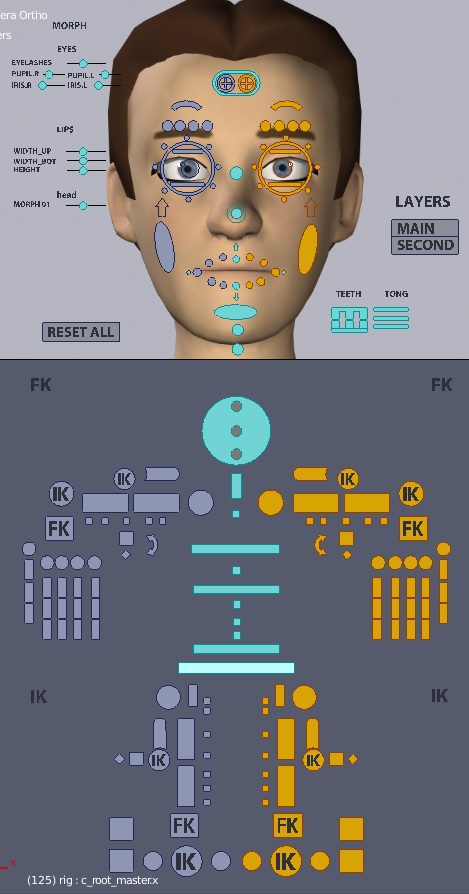
ユーザーインターフェイス - コントローラ
- コントローラのボーンは、3Dビューで直接選択するか、ボーン選択インターフェイスを使用して選択することが出来ます。
- ビューポートでコントローラを非表示にするには「オーバーレイ」を無効にします。
- 選択パネル:コントローラのグループ(腕、脚、セカンダリ等)を矩形選択(Bキー)したり、レイヤーの表示/非表示を行う事で簡単に選択することができ、ピッカーのレイアウトをカスタマイズする事も可能です(PickerPanelの記事を参照)
選択ボタン
レイヤー:選択パネルのボタンをクリックするだけで、簡単にレイヤーを表示/非表示出来ます。
- メイン:キャラクタのポージングを行う為のメインコントローラです。ここではあまりシェイプを微調整する事は出来ませんが、開始する為の良い基礎になります。
- セカンダリ:微調整用のコントローラです。拡大/縮小、移動、特定のボディパーツの回転、形状の微調整等を行います。
命名規則
- プリフィクス「c_」で命名されたボーン(例:c_root_master.x)は「コントローラ」です。これらのボーンはメッシュの変形に関わります。
- サフィックス「_ref」で終わるボーン(例:root_ref.x)はは「リファレンス」で、最終的なリグの位置を合わせる為のガイドです。リグシステムの一部ではありませんが、アーマチュアの一部として非表示レイヤーにあり、「Edit Reference Bones」をクリックすると表示されます。メッシュの変形には関わりません。
- プリフィクス無しで命名されたボーンは、リグの機構に必要な内部ボーンです。メッシュの変形に関わります。
- 「.l」と「.r」はキャラクタの左右を示します(+X、-X)。右側のコントローラは青、左側は赤です。
- 「.x」はキャラクタの中心に属する事を示し、緑色で表示されます。
- ボーン表示用のシェイプオブジェクトのプリフィクスは「cs_」です(カスタムシェイプの略)。
リグの使い方
キャラクタのスケーリング
グローバルスケールを適用するために、リグ(アーマチュア)オブジェクトをスケールします。キャラクタメッシュオブジェクトは、アーマチュアの親でなければなりません。
- 「c_pos」と「c_traj」コントローラを直接スケーリングするのはリギングの観点からは安全ですが、アーマチュアモディファイアの「Preserve Volume」オプションを使用する場合は注意が必要です。その制限により、肘や膝などの骨が回転する部分の変形が悪くなる可能性があります。
- メインコントローラは一部を除いて全て拡張可能です。トランスフォームの値をアンロックしないでください。特定のパーツをスケーリングするには、セカンダリコントローラ(セカンドレイヤー)を使用してください。
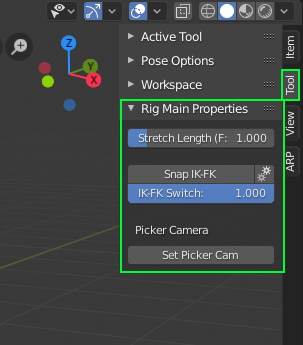
手と脚
手、または脚のコントローラ(例:c_hand_ik.l)を選択します。
Nキーを押して3Dビューの右側にあるプロパティパネルを表示し、ツールタブ>Rig Mainプロパティを確認して下さい。
プロパティ:
- ストレッチの長さ:チェインの長さを指定します。
- オートストレッチ:自動ストレッチ(IKチェインのみ)の有効/無効を切り替えます。(1.0=有効、0.0=無効)
- ロールの修正:脚を大きく回転させた時の足首のロール/ツイストを修正します。四足歩行のリグに便利です。
- IK-FKスイッチ:キネマティックタイプを手動でIKからFKに切り替えます。(1.0=FK、0.0=IK)
- スナップIK-FK:モードを切り替えてスナップします。現在IKに設定されている場合はFKに、その逆の場合はIKに設定されます。
- 歯車のアイコンをクリックすると、高度なスナップボタンにアクセスすることができます。
- Snap FK > IK:FKチェーンをIKチェーンにスナップします。IK-FKスイッチはそれに応じてFK(1.0)に設定されます。
- Snap IK > FK:IKチェーンをFKチェーンにスナップします。IK-FKスイッチはIK(0.0)に設定されます。
- Bake FK > IK:指定したフレームの範囲でIKチェーン上でFKチェーンをスナップし、キーフレームにベイクします。FKアニメーションをIKに変換するときに便利です。
- Bake IK > FK:指定したフレームの範囲でIK チェーンをFKチェーン上でスナップし、それをキーフレームにベイクします。IKアニメーションをFKに変換するときに便利です。
- Snap Pole Parent(IKのみ):IKポールの親空間(ローカル/グローバル、例えば脚の足の親空間、またはグローバル「c_traj」の親空間)を切り替えてスナップします。親ボーンを変更するには、ポールコンストレイントを参照してください。
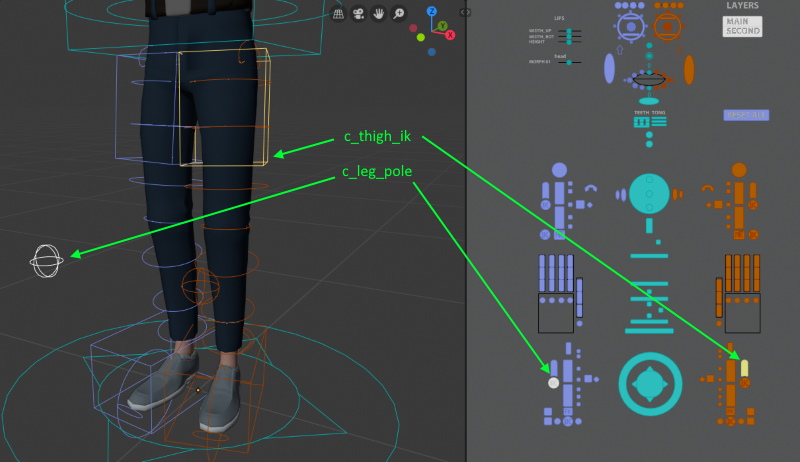
脚
脚のメインコントローラ
コントローラ「c_foot_roll_cursor」を選択すると、脚の動きにアクセスすることができます。
IKモードではポールコントローラを使用して膝・肘の向きを調整するか、回転コントローラを使用して直接回転させることができます(Rキーを2回押すと簡単に回転させることができます)。
- バンク左右:Z軸の移動
- かかと/つま先からの足の回転:X軸の移動
- つま先からの足の回転:つま先のピボットからかかとを回転させるためにコントローラ「c_foot_01」を選択します。
IKモードではポールコントローラを使用して膝・肘の向きを調整するか、回転コントローラを使用して直接回転させることができます(Rキーを2回押すと簡単に回転させることができます)。
3ボーンの脚
脚が3つのボーンで設定されている場合、IKコンストレイントは3 Bones IKスライダーを使用して、2つ、または3つのボーンに影響を与えることがあります。

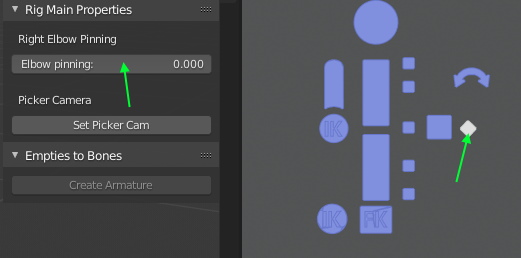
肘と膝のピン止め
ピン止めされたボーンを選択し、ピン止めプロパティを1.0に設定すると完全にピン止めされます。
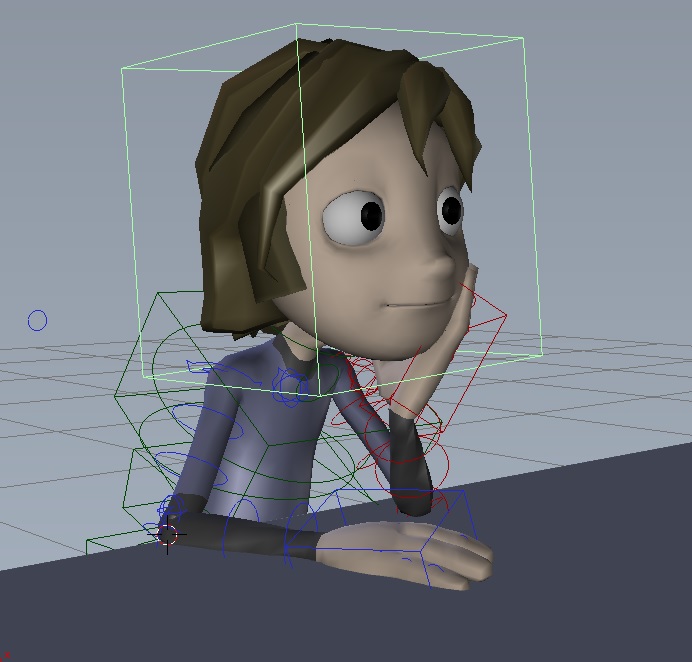
肘をテーブルの上に固定してくっつけるキャラクタの典型例。
肘をテーブルの上に固定してくっつけるキャラクタの典型例。
頭
ヘッドコントローラを選択することで、首の回転をロックしたり、ロックを解除したりすることができます。こうすることで、首の回転を継承するかどうかが決まります。

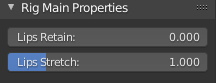
リップ
顎コントローラを選択することで、顎を開いたときに唇を密閉したままにするために、追加のストレッチとスカッシュを加えたリップスのリテイン値を使用します。
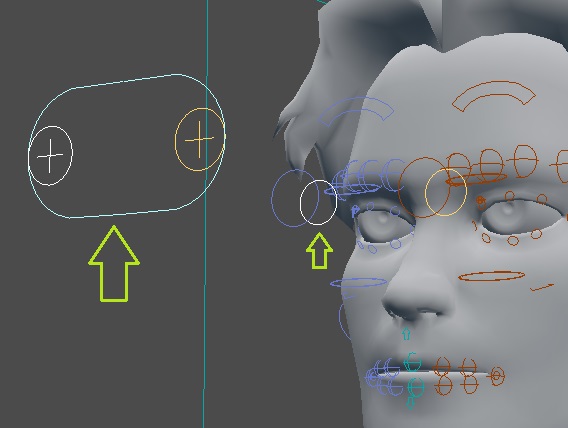
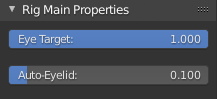
眼とターゲット
目のアニメーションには2つの方法があります。ターゲット (IK, translation) を使いたい場合は、矢印の前のコントローラを選択してください。そうでない場合は、眉の下の円を使います。小さい方が目の反射をコントロールします。
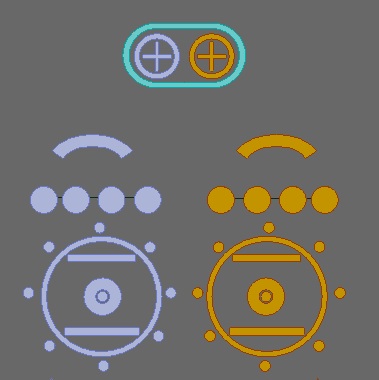
これらのコントローラを選択すると、このプロパティがプロパティパネルに表示され、どのオプションを使用するかを選択できるようになります。
これらのコントローラを選択すると、このプロパティがプロパティパネルに表示され、どのオプションを使用するかを選択できるようになります。
自動まぶた
目の回転に基づいた自動まぶたの回転量は、目またはまぶたのコントローラーをクリックするとわかります。
指
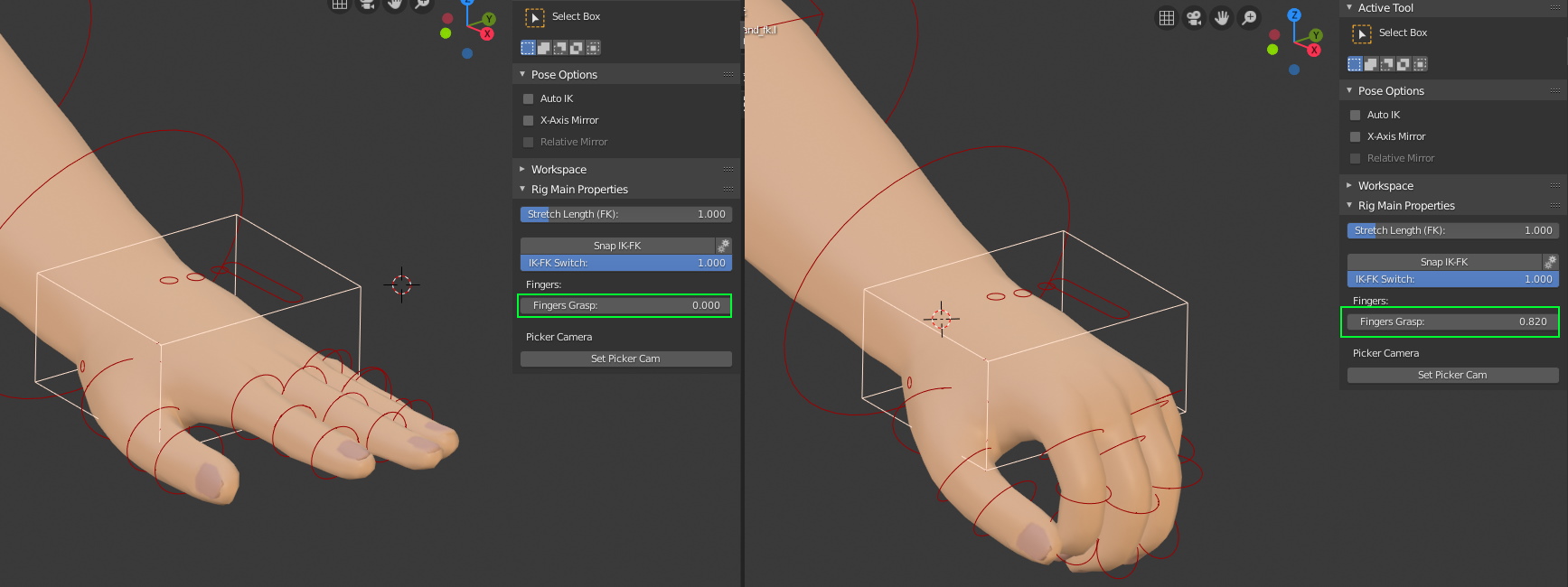
- すべての指を一度に曲げるには、ハンドコントローラを選択し、Rig Main PropertiesタブのFingers Graspプロパティを微調整します。
リギングのセットアップに応じて、2つまたは3つの指ボーンを回転させます(「スケールから指を回転させる」を参照してください)。
| 備考:本操作は指をX軸上で直線的に回転させるだけなので、きちんとした拳のポーズを作るには正確さに欠けるかもしれません。本物の拳のポーズを作るために手の拳機能を使用してください。 |
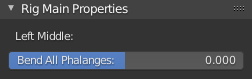
- 任意の指ボーンのベースを選択してこのパラメータを使用することで、3本の指節骨を一度に回転させることができます。
- 手にこぶしコントローラー(Hand Fist)が追加されている場合、スケーリング時に指をあらかじめ定義されたこぶしのポーズにきれいにカールさせることができます。これは Grasp Fingersプロパティよりも正確です。
- リグがRot from Scaleパラメータで設定されている場合、最初のファランジをスケーリングすると、他のファランジも回転します。
小指の人差し指を回転させると、他の指も同様に広がっていきます。
セカンダリコントローラ
セカンダリーコントローラを駆使して、細かいポーズのスカルプトを自由に行ってください。例えば、極端な脚の変形(デフォルトのスキニングウェイト)は、微調整前と調整後のものです。
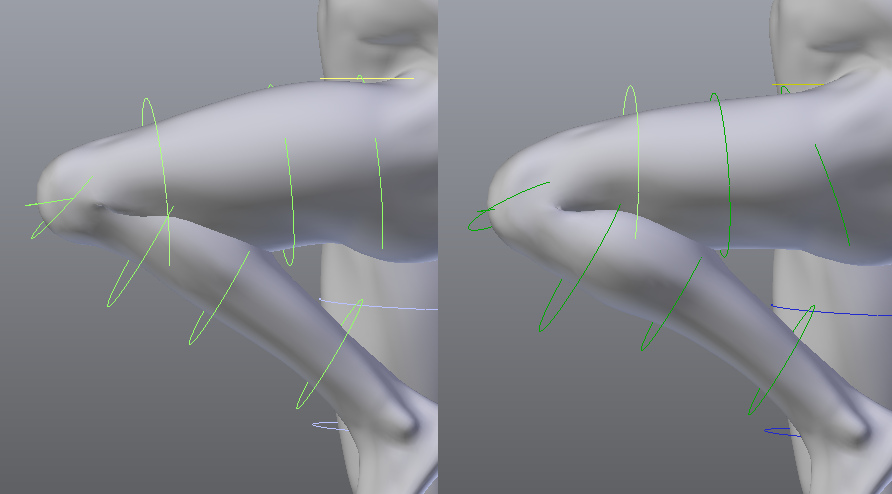
さらに、補間のシェイプキーを作成することもできます。お好みのワークフローをお選びください。
さらに、補間のシェイプキーを作成することもできます。お好みのワークフローをお選びください。
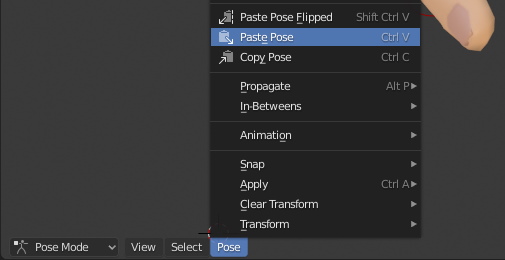
ポーズのミラー
ミラーリングしたいコントローラを選択し、下記のボタンをクリックします。
複数キャラクタに対応したUIカメラ
シーン内に複数のキャラクタが存在する場合は、Rig Main PropertiesタブのSet Picker Camをクリックして、ピッカーウィンドウのビューを選択されたキャラクタで更新します。

コメントをかく